scaredyBot
ScaredyBot
A robot that runs away from people, built using an iRobot Create2,
the pyCreate2 library and
a Raspberry Pi.
By N. Escobar / nickesc
COMP 349: Robotics
Videos - Youtube Playlist | Github: nickesc/scaredyBot
1. Abstract
In this report, we go through the process of building ScaredyBot. It will start with a detailed description of the
project as it stands and describe what was accomplished and why, as well as a brief discussion of the goals of the
project and how they changed significantly when I abandoned the idea of using an Arduino in favor of a Raspberry Pi
and changed my strategy for sensing people near ScaredyBot. Next we go through the process of actually building
ScaredyBot. Then, we’ll discuss the many challenges and setbacks faced during the process. Finally, we’ll finish with a
wrap up and conclusion reflecting on the experience.
2. Overview
I wanted to make this project because I really enjoyed the Create2 robots, but they were incredibly limiting. I also
really enjoyed working with the Arduino, and I saw a lot of potential for what could be done with both of them
together. The Create2 also really felt like it was alive and had a personality, and I wanted to explore that further.
From this project I learned a lot about how to work with GPIO and how to interface between different devices, and
learned valuable lessons about checking wiring to avoid costly mistakes.
So, ScaredyBot was born. ScaredyBot is a robot that runs away from you when you get too close. It uses a PIR motion
sensor to tell when you’ve approached it, and then chooses a semi-random direction and runs away from you. He avoids
obstacles and walls, rotating away from them to keep running. He has two main states, _searching and _running.
We’ll go over the objectives of the lab first, looking especially at how they changed. The introduction of
the Raspberry Pi
made a big difference. Next, we’ll go through our components and the process of building, wiring, and coding ScaredyBot
from testing sensors to deployment. Then we’ll discuss the challenges that came with this, most notably frying many of
the sensors I’d hoped to use and an unfortunate bump that affected ScaredyBot’s motion sensor.
3. Objectives
The top-level objective for this project was to create a robot that ran away from people when it was approached. Below
this, I wanted to use a microcontroller to interface with an iRobot Create2 and extend its functionality.
To do this, I would, initially, use an
Arduinoto extend the sensing capabilities of aCreate2with things like a vibration sensor to detect when there was a person nearby by sensing the vibration in the ground from their footfalls. This quickly pivoted when both the controller and sensors proved to be unsuitable for the task.Still using the
Create2, I would use aRaspberry Pias the controller to handle sensor input and robot behaviour instead, and I would replace the vibration sensor with other, more appropriate sensors like a PIR motion sensor.
4. Methods
4.1 Electrical Components:
img 4.1.1: ScaredyBot components, from top to bottom, left to right:
Raspberry Pi 3 Model B+- GPIO extension board
- PIR motion sensor
- motion sensor header
- breadboard
- various jumper cables
- button
- RGB LED
- 1x 10kΩ resistor
- 3x 220Ω resistor
- GPIO ribbon cable
- 2x ultrasonic sensor modules (fried)
- obstacle avoidance sensor module (fried)
4.2 Sensor Readings
a note on this section: the methods describe don’t quite line up to the prelab. We’ll be discussing everything that happened after prelab testing
- in class on the first day of the lab, I begin to test the piezo’s vibration sensing capabilities, which I’d been
hoping to use, and they are extremely limited. The piezo does not pick up footfalls, so I need to pivot fairly
significantly
- I choose to rely on a PIR motion sensor. This sensor detects movement using IR, and when a warm body passes
through the sensor, it outputs
True. I also grab an ultrasonic distance sensor, thinking I can use this to sense where walls and obstacles are better than theCreate2already does - at the same time, I realize this is going to be a significant change, and while I’m already there decide to swap
from an
Arduinoto aRaspberry Pi. This opened up a lot of possibilities, and untethered me from my laptop, as theArduinoneeded to use the laptop’s serial connection to control theCreate2
- I choose to rely on a PIR motion sensor. This sensor detects movement using IR, and when a warm body passes
through the sensor, it outputs
- after pivoting the approach, I start by figuring out how to actually use the GPIO of the
Raspberry Pi. While a lot of the work I did in the prelab for theArduinowent to waste, getting comfortable wiring and working with GPIO and on a breadboard was helpful. However, I’m working with GPIO in Python rather than a C-like langauge, so there’s some adjustment - Once I have a handle on the system and how to work with it, I start to test my new sensors and figure out how they
work
- I’d also purchased one of
the Raspberry Pi Starter Kits
, which comes with a number of new sensors
- from this pack, I take all the electrical components in the project but one distance sensor and
the
Raspberry Pi. - I also swap out my PIR sensor, as the one from class is soldered into the
Non-Retriggeringmode, and I want the opposite.
- from this pack, I take all the electrical components in the project but one distance sensor and
the
- a lot of trial and error goes into this
- first I write generic tests to see the output of the sensors individually, then bring them together and to see all outputs.
- I also experiment with adding a gyroscope at this point, but quickly realize it’s unnecessary and drop it
- once I’m sure all sensors are reading (note: one distance sensor was dead-on-arrival, and would not read
correctly so had to be dropped too), I write a method for the robot to access
them,
sensors.py, and create an initialscaredyBot.pyfile that just imported it and read the sensors
- I’d also purchased one of
the Raspberry Pi Starter Kits
, which comes with a number of new sensors
- at this point we hit catastrophic failure. While cleaning up the wiring, I accidentally fry a number of components,
including three of my sensors and spend the night scrambling to figure it out
- I’m left with my PIR motion sensor, thankfully. This becomes our only external sensor. Read section 5. Challenges for more information on this
img 4.2.1: the initial goal for sensors; see: PIR motion sensor, ultrasonic distance sensor, and object detection sensor
img 4.2.2: the broken output from fried sensors. From left to right: distance, other distance (DOA sensor), motion (only working sensor), obstacle
img 4.2.3: the compromise once sensors were fried; see: PIR motion sensor; ultrasonic distance sensor included because I liked his eyes
- at the end of the night though, we have mostly finished with our sensors and are ready to move onto the robot
4.3 Making ScaredyBot
- in
scaredyBot.pyI start to construct theScaredyBot()class, and I decide the best method to handle his behaviour is with a finite-state-machine of this form:
class ScaredyBot():
def __init__(bot):
bot.scaredyBot = ScaredyBot()
def loop(bot):
while True:
bot.state.execute()
time.sleep(.01)
def destroy(bot):
quit()
class _state():
def __init__(_state, scaredyBot):
_state.scaredyBot = scaredyBot
def getName(_state):
return "stateName"
def enter(_state):
print('entering', _state.scaredyBot.getState())
def execute(_state):
pass
def exit(_state):
print('exiting', _state.scaredyBot.getState())
- from here, I start constructing methods for getting sensors with the robot, creating a
PIRclass to handle the motion sensor inMotion.py- I also realize that an indicator for ScaredyBot’s four states would be helpful, and add an RGB light with
the
Light()class inside thePIR()class- off in
_start, the setup state, - green in
_searching, when it’s looking for motion and - red in
_running, when it’s running from detected motion - off in
_end, when the program cleans up connections and terminates
- off in
- I also realize a power button would be incredibly helpful, and add one that triggers the beginning of the loop
and kills the program, with the
Power()class inpowerButton.py
- I also realize that an indicator for ScaredyBot’s four states would be helpful, and add an RGB light with
the
- Now, we’re finally ready to add movement.
- I start by mounting the breadboard,
Raspberry Piand eyes to a plate, which I then tape to ScaredyBot’s top, hiding theCreate2cable and a portable power-bank for power to theRaspberry Piunderneath - Next, I write methods to make it search for motion and rotate to a random direction behind it when it is triggered
- then, I realize that another state-machine is appropriate, and in
_runningI add a less complex state machine to handle the different phasesrotatingwhen the roomba is turning aroundrunningwhen the roomba is actually running awaywaitingthe cooldown period for the motion sensor (about 6 seconds) where the roomba needs to be stationary to reset
- from here, we have a robot that will run until it hits a wall or for a few seconds anytime it detects motion
- I start by mounting the breadboard,
- here, the rest is pretty simple:
- I remove the wall end condition and make it always run for a certain amount of time, rotating and running away from obstacles when it reaches them, and spend a good deal of time debugging this
- I also tell ScaredyBot to back up a little if it senses a bump while
waitingand turn around. This makes him less idle and just waiting, and like he’s still trying to avoid you when you walk up to him - The project is basically finished, when ScaredyBot runs over a metal bump on the floor and screws up his motion
sensor. I spend hours debugging, but am not able to fully fix it. ScaredyBot is, unfortunately, never the same.
Read
section 5. Challenges for more information on this
- But he still works! It just took a few tries
- Video of the robot running away from me - stationary camera
- Video of the robot running away from me - following camera
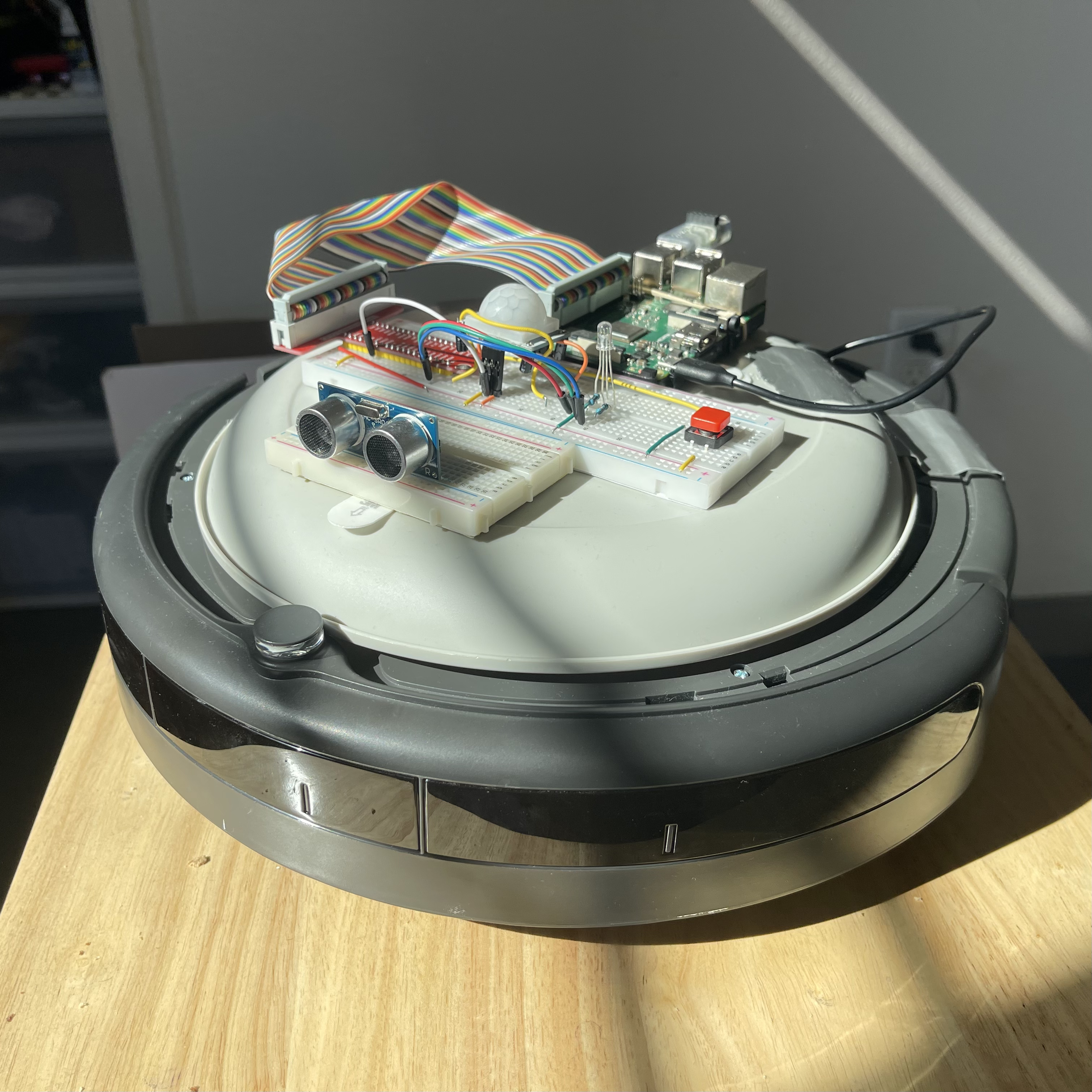
img 4.3.1: final wiring for ScaredyBot, front view
img 4.3.2: final wiring for ScaredyBot, back view
img 4.3.3: ScaredyBot without his housing (a plate) on top
5. Challenges
This project was full of challenges. At nearly every turn, things either went differently than expected or completely broke, which forced me to change tact a number of times.
The first challenge I ran into was in the communication between the
ArduinoI’d initially planned to use and theCreate2. While it was possible, it was incredibly inelegant. I found theCreate2wouldn’t be able to be controlled from theArduinousing thepyCreate2library because it could not executePythoncode, and that I would need to pass the sensor readings from it to another controller using serial (or, more specifically,pyFirmata). It forced me to use three devices, all of which needed to be wired to each other: theArduino, theCreate2and my laptop. TheArduinohandled some sensor readings, theCreate2handled movement and the others, and the laptop acted as the controller, with serial in and out from the other two.The solution was to drop the
Arduino, and instead use aRaspberry Pias the controller. This opened up a new world of possibilities, because the Pi could not only natively run the Python code and interface with theCreate2using its included USB cable, but it could be used to program on. This made my workflow significantly faster, as I could just run agit pulland edit whatever small things I needed to on the machine without having to reset entirely. It also let me connect and execute the code over SSH, which became integral once ScaredyBot was mobile; I couldn’t plug an HDMI or Ethernet cable into the Pi, and plugging it in to test every time would have been a huge hassle and waste of time.
At the same time, I realized the piezo wasn’t going to be sensitive enough to read vibrations in the ground from footfalls. This meant I’d need new sensors. In class, I’d eyed the PIR motion sensor, but the starter kit I got gave me access to more hardware and sensors. From there, I had to learn how to read the new sensors, which took a good amount of trial and error, messing with sensitivities and sensing-modes and reading hundreds of line sof output.
With the new motion sensor, I also had to figure out a way to keep it upright and still on the breadboard, as its pins wouldn’t reach beyond the components on its board. As a workaround, I removed the connectors from an extra USB-to-serial cable and added headers to the pins.
The biggest problem came when I, stupidly, plugged a ribbon cable into a GPIO extension board the wrong way. While rewiring the breadboard after testing and refining all the sensors I was using, I folded the cable over and lost track of the initial direction. Not thinking, I plugged it in the wrong way, and instantly fried three-out-of-four of the sensors. I had lost my ultrasonic and obstacle avoidance sensors, as well as the extension board and possibly the breadboard. It took a while to figure out what I’d done, but when I realized, I saw that I would need to pivot significantly. Thankfully, the PIR motion sensor wasn’t touched, which would have killed the project.
From here, a significant amount of the project was changed. The scope would become smaller, and the only sensor used to detect someone would be the motion sensor. It was not, however the end of the world, because the motion sensor ended up being all I strictly needed to make it work. Thankfully I hadn’t programmed robot behaviour based on those sensors, but I had to scrap a huge amount of work on sensors that I’d done in order to accommodate the mistake. At the end of the night, I was, however, ready to move onto programming motion.
The next challenge also came when I had to drop off the
Create2. I had to stop working with it, but needed to keep working, I had things to code and test. My workaround was to create a dummyCreate2andPIRclass, which would feed mostly-random sensor readings from all the sensors I was using and give me dummy methods for theCreate2. While the motion sensor wasn’t completely necessary, it allowed me to code and test on my laptop in PyCharm without being connected to the Pi at all. This sped up workflow yet again, and let me keep working without either device. The important thing to mimic accurately was the motion sensor, and a good amount of time went into making the dummy classes work properly. Probably more than was necessary. While the dummy classed sped up workflow, the amount I worked on them was also a waste of time.
I also realized I would need a way to reliably stop a robot that was going to be running away from me for mine and ScaredyBot’s safety. I decided to add a stop/start button to the breadboard, that acted as the trigger for entering the
_searchingstate for the first time, and as an emergency stop that would actually shut down the GPIO andCreate2, instead of akeyboardInterruptwithctrl + C.
From here, coding the movement actually went pretty smoothly, comparatively. And once ScaredyBot was moving, I only really had two challenges; one was significantly greater than the other, however.
The first, I realized that my motion sensor was tilted so that it was facing slightly backwards (see img 4.2.3). This meant it was much more likely to detect movement behind than in front, and had a much larger range backwards. I was confused why anytime I walked behind the roomba, regardless of distance, it would activate and run; once I realized what was wrong, I used jumper cables on the breadboard to hold up the sensor and keep it pointed directly upwards (see img 4.3.1 and img 4.3.2). This worked perfectly, and it’s activation radius became the same on all sides.
The last and most frustrating challenge came at the very end. As I was testing the nearly-final build, the Create2
ran over a bump in the floor. This dislodged the motion sensor from the headers, and somehow irreversibly damaged it.
After this, the sensor would throw random false positives in an empty room, I spent the last few hours with ScaredyBot
trying to debug the sensor. I found that as the sensor was on longer, it would throw more false positives, but that once
it hit its third time in the _running state, it would almost always be throwing consistent false positives. Getting
the final video showing the roomba working correctly took many tries. Consistent behaviour of the sensor, however, can
be seen in the progress video.
6. Future Work
If I were to continue this project, there are a lot of ways that I could see myself expanding it. My first thought is to use the sensors I’d initially been hoping to.
I’d wanted to use the ultrasonic sensor to determine if the roomba was going to hit a wall before it actually hit it and create a turning radius to avoid the wall. It would basically function like a more advanced version of the
light_bumpsensor on theCreate2, but with its own drawbacks, like only having one. When I had all my hardware at first, I’d planned to use two ultrasonic sensors to combat this, but the second sensor was dead-on-arrival. I’d also wanted to use the obstacle avoidance sensor (essentially what thelight_bumpis) to sense backwards, and see if there was anything directly behind the roomba at all times, which would let it run from people approaching the back in the_runningstate’swaitingphase.
I also think it would be interesting to do this project without motion sensing at all, and to instead rely on cameras. This, however, was outside the scope of what I felt capable of, so I did not attempt image processing.
Using any manner of other sensors to get a more accurate picture of the space immediately around the roomba would be a fun expansion, things like sound, light or vibration (like the prelab planned to use) can all be used to detect movement, and all together can create a clearer picture and help to combat false positives from the motion sensor.
7. Conclusion
All in all, building ScaredyBot was a lot of fun. I really, really enjoyed getting to learn how to interface with other devices and make a single thing from many components. It also taught me that I really like working on hardware, something I rarely have a chance to do.
Overall, I’m incredibly happy with how this lab turned out. I feel like it was a complete success, and one that I feel proud of. I’m incredibly happy with how the code for this project came out, I think it’s quite clean but sophisticated. I really like working with finite-state-machines, and I’m glad I got to build one like this.
If I was going to redo this lab, I’d go all out. I’d want to get as much hardware and as many sensors as I could and just have fun with it. I would want to try to get his detection really accurate mainly. I’d also love to give him more personality, but that was somewhat outside the scope of this project.

a. References:
Last Minute Engineers: How HC-SR501 PIR Sensor Works & Interface It With Arduino
MomsFriendlyRobotCompany/pycreate2
SunFounder Docs: 1.1.2 RGB LED
SunFounder Docs: 2.2.5 IR Obstacle Avoidance Sensor